 Tweet
Tweet
Đây là hệ thống thứ 4 trong ITS PLC, em xin post lên để các anh, các bạn cùng thảo luận
toàn bộ hệ thống
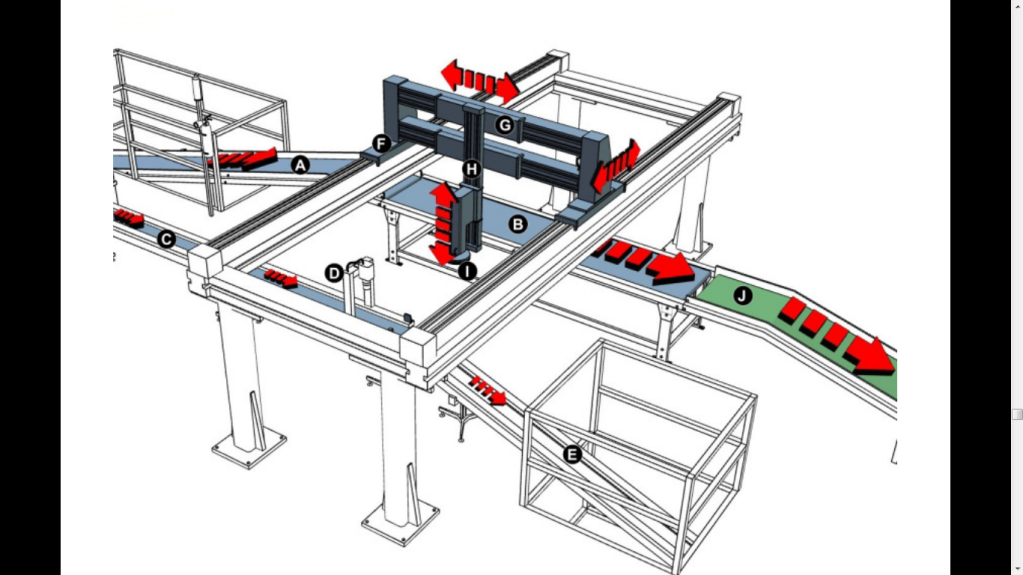
và vấn đề của bài này là làm thế nào để đặt được được những linh kiện này vào đúng các vị trí trong hộp


sơ đồ di chuyển của tay máy
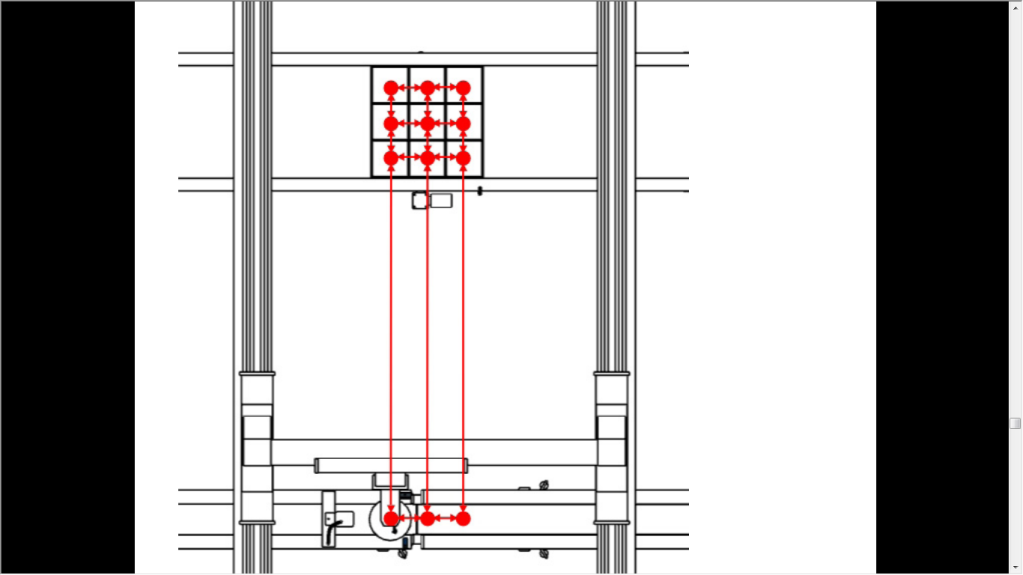
(6 chấm ở trên là 6 ngăn ở trong thùng xốp. Còn 3 vị trí ở dưới, thì vị trí đầu đầu tiên bên trái là chỗ vật đó đứng ....)
Có 4 động cơ giúp cho tay máy di chuyển về 4 hướng như sau : Khi nằm trong phạm vi của thùng xốp (6 chấm trên) thì nó sẽ di từ ô này sang ô kia (2 ô gần sát nhau) là lại dừng, muốn di chuyển sang ô tiếp theo thì lại phia set cho động cơ hướng đó.
Khi ra khỏi phạm vi 6 chấm trên thì nó sẽ di chuyển một mạch sang phạm vi 3 chấm dưới để gắp vật. Sau đó đi về và đặt vật đúng vị trí .
Các vật sẽ được phân biệt nhờ vào cảm biến với các bit 0 và 1.
Xin cảm ơn các anh, các bạn đã ghé xem topic của em.
Xin chúc các anh em luôn gặt hái nhiều tiếng cười trong cuộc sống !!!
toàn bộ hệ thống
và vấn đề của bài này là làm thế nào để đặt được được những linh kiện này vào đúng các vị trí trong hộp
sơ đồ di chuyển của tay máy
(6 chấm ở trên là 6 ngăn ở trong thùng xốp. Còn 3 vị trí ở dưới, thì vị trí đầu đầu tiên bên trái là chỗ vật đó đứng ....)
Có 4 động cơ giúp cho tay máy di chuyển về 4 hướng như sau : Khi nằm trong phạm vi của thùng xốp (6 chấm trên) thì nó sẽ di từ ô này sang ô kia (2 ô gần sát nhau) là lại dừng, muốn di chuyển sang ô tiếp theo thì lại phia set cho động cơ hướng đó.
Khi ra khỏi phạm vi 6 chấm trên thì nó sẽ di chuyển một mạch sang phạm vi 3 chấm dưới để gắp vật. Sau đó đi về và đặt vật đúng vị trí .
Các vật sẽ được phân biệt nhờ vào cảm biến với các bit 0 và 1.
Xin cảm ơn các anh, các bạn đã ghé xem topic của em.
Xin chúc các anh em luôn gặt hái nhiều tiếng cười trong cuộc sống !!!


Comment